Urgent Need for Safe Perception, Coordination, Planning, and Navigation
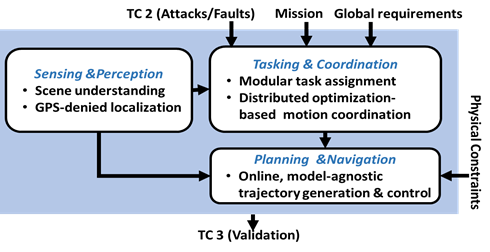
TC1 will develop computationally effective and scalable sensing, perception, coordination, planning, and learning-based control techniques, to provide a safe and scalable UAM network. This will lead to future UAM networks that reliably and adaptively provide mobility services for spatio-temporally distributed demands over a congested and potentially GPS-degraded airspace cluttered by moving and unknown objects. Near-future UAM networks are expected to involve both UAV-to-Ground station (U2G) and UAV-to-UAV (U2U) communication capabilities.